このページの目次

比例制御は、加熱方法によって時間比例制御、連続比例制御、位置比例制御の3つに別れます。
①時間比例制御(スイッチング制御)
◎ 時間比例制御とは、設定値を中心とした比例帯の中で、ONとOFFの時間の比率(デューティー比)を、設定値との偏差に比例させて細かく変える制御です。
比例制御では、操作変数は、連続的に変化できなければなりません。
しかし、電圧、電流などの電気的量を操作量とするときには、スイッチングによるON/OFFは、簡単に実現できますが、連続的に変化変化させることは、苦手です。
このため、実際にはON/OFFでありながら、擬似的に連続的に変化させる、方式が使用されています。スイッチング制御と、呼ばれる方式です
スイッチング制御における、操作変数は、ON/OFFの、パルス列です。
ON/OFFが繰り返される波形では、繰り返し周期に対するオンの時間比を、 デューティ と言います。
デューティは、アナログ量です。
そして、この繰り返し周波数が、十分に高いときは、スイッチングされていることが無視できて、連続的な制御と見なすことが、できます。
スイッチングパルスは、近似的に、アナログ量と見なすことができ、スイッチング制御を使用することによって、連続的な比例制御を行うことができます。
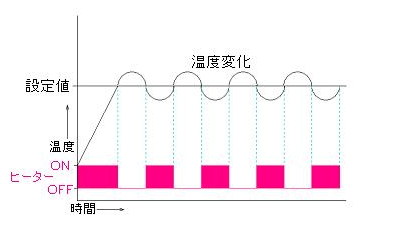
◎ ONとOFFの1周期は一定で、この時間を制御周期といいます。仮に1秒と設定したとすると、現在値が比例帯より低い範囲にある場合は、調節計からの出力は常にONです。
また、現在値が比例帯より高い範囲にある場合は、調節計からの出力は常にOFFです。
比例帯内では温度により、ONとOFFの時間比率は、設定値との偏差に比例して変わります。
例えば、現在値が設定値より低い場合、ON時間が0.7秒だとすると、OFF時間は0.3秒となり、ON時間の方が長くなります。
現在値が設定値に達した場合は、ON時間、OFF時間とも0.5秒で、同じです。
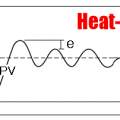
時間比例制御とON-OFF制御を比較してみましょう。電気ヒータの制御を例に取ると、ON-OFF制御の場合、電気ヒータはON点とOFF点(設定値)で切り替わってしまうので、検出遅れなどによる行き過ぎ量は大きくなります。
これに対し、時間比例は、現在値が比例帯内に入ると、設定値との偏差に応じてONとOFFの時間比率を変えていく為、ON-OFF制御と比較して、検出遅れなどによる行き過ぎ量は小さくて済みます。
時間比例制御では、制御周期は短ければ短いほど良好な結果を得るための重要な要素です。
時間比例制御には、電圧出力を使用して無接点リレーのSSRと組み合わせます。
SDC15では0.5秒と短く、良好な制御結果が得られます。
②連続比例制御
連続比例制御とは、現在値と設定値との偏差に応じて、調節計から連続的に4~20mAや1~5Vを出力して、操作器に入力し、電気ヒータを0-100Vの間で連続的に制御します。
例えば4-20mAの出力では、
4mA→0V
12mA→50V
20mA→100V
と制御電流値で出力電圧値を制御します。
連続的に切れ目無く出力電圧を供給できるので、加熱器などに対して負荷の少ない、安定した制御ができます。
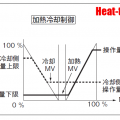
③位置比例制御
位置比例制御とは、時間比例制御、連続比例制御と同じく、現在値と設定値との差、偏差に比例した操作量で働く制御動作を言い、調節計のリレー出力で電動調節弁を開閉し、ガスや重油の燃焼炉の制御や送風機のダンパーの制御を行います。
例えば、設定温度が700℃、比例帯は設定値の±100℃(600~800℃)に設定したとします。
熱電対による検出温度が比例帯より低い温度範囲(600℃以下)にある時、電動調節弁のモータの開度は100%(全開)になります。
検出温度が600℃以上になって比例帯内にはいると、偏差に比例した操作量が働きます。
検出温度が650℃の時、モータの開度は75%となり、検出温度がちょうど設定値に達した時、偏差がなくなりモータの開度は50%となります。
更に検出温度が設定温度を越え、高くなると、モータの開度は徐々に閉じて行き、比例帯の上限値である800℃を越えると、モータの開度は0%(全閉)となります。
一般的にモータの開度は0~160°の範囲で回転し、操作量50%の時、モータ開度は80°となります。
また、制御精度は比例帯の大小によっても異なり、小さいほうがモータの開閉動作が頻繁に起こり、制御精度は良くなりますが、極端に狭くするとハンチングを起こしてしまい、モータの製品寿命を縮めてしまいます。逆に比例帯を大きくしすぎると、温度変化が大きく変化しない限り、モータは動作しない為、制御精度は悪くなります。
時間比例、連続比例、位置比例の3種類の比例制御方法は、制御する方法、求める制御結果によって使い分けられ、一般的には連続比例制御が一番高精度です。
電気的量をアナログ動作で絞って使用すると、損失が発生します。
トランジスタをアナログ動作で使用すると、トランジスタの両端に電圧が掛かり、トランジスタで電力を消費します。
しかもこの損失はすべて熱となり、大きな発熱を伴います。
スイッチング動作でも、損失をゼロにすることは、できませんが、アナログ動作に比べれば、損失をはるかに少なくすることができます。
したがって発熱も少ないのです。これがスイッチング制御の最も大きな特徴です。
昔はスイッチ素子としてリレー (電磁開閉器) が使用されており、高速なスイッチングは不可能でした。高速、精密な制御を必要とする場合には、スイッチを使用することができないので、操作部に空気圧や油圧を使用していました。
しかし、最近ではトランジスタやサイリスタ、パワーMOSFET、IGBTなどのさまざまな高速大容量の半導体スイッチが利用できます。このスイッチング制御の技術によって、電気を操作量とする制御は急速に発展しました。
近年の制御技術の進歩の大きな要因は、マイコンの利用によって高度な制御演算を、簡単、安価に実現できたことです。
しかし、それだけではなく、このような操作部の発展に負うところも、極めて大きいのです。
モータの制御には、スイッチング制御が、多く使用されています。