このページの目次



PID調節器で良好な制御を行うためには、制御対象に合った適切なPID定数を設定する必要があります。
PID定数の調整を行うことを「チューニング」と呼んでおり、アナログ調節器が全盛の頃は、このチューニングをオペレータが手動にて行っていました。
PIDの最適値を求めるためには、多くの経験や知識を必要としました。
調節器がアナログ式からディジタル式に移行してマイコンが内蔵されると、制御対象に応じたPID定数の自動算出と設定を行う「オートチューニング機能」が搭載されるようになり、さらに、最近ではオートチューニングよりさらにインテリジェントなセルフチューニング機能も搭載されています。
■オートチューニング機能
温度制御を行うPID定数は制御対象の特性により、数値、組合せが異なります。従来より、これらPID定数を実際の制御している温度波形より導き出す手法が種々提案実施されています。いろいろな制御対象でも適切な制御を行えるPID定数をこれらの手法で導き出す方法をオートチューニングといい、代表的な手法として、ステップ応答法、限界感度法、リミットサイクル法があります。
●ステップ応答法
設定値を最もよく使用する値にします。操作量100%をステップ状に出力し最大温度傾斜(R)とむだ時間(L)を計測し、RとLの値よりPID定数を算出します。
●限界感度法
スタート時点(A点)から比例動作を開始します。比例帯の幅を少しずつ狭めていき温度の振動を発生させます。このときの比例帯の値と振動の周期(T)よりPID定数を算出します。
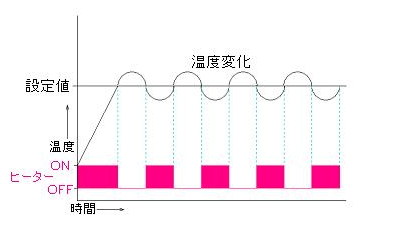
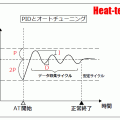
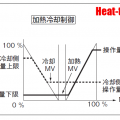
●リミットサイクル法
スタート時点(A点)からON/OFF動作を開始します。これにより発生するハンチングの周期(T)と振幅(D)の値よりPID定数を算出します。
■セルフチューニング機能
セルフチューニング機能は、日常の運転時における操作や、制御状態が良好でなくなった場合に自動的に実行し、PID定数の算出と設定を行います。
●[電源投入、目標値変更、STOP→RUN の操作を行った]
●[制御応答が振動した]
①電源投入、目標値変更、STOP→RUN変更時のセルフチューニング
電源投入・目標値変更・STOP→RUN 時の目標値応答波形を観測し、PID定数を自動算出します。
特徴は、「PID定数の算出」と同時に「波形観測処理」により目標値応答波形を評価し、応答が良好でない場合にのみ算出されたPID定数をセットするところにあります。
(目標値応答波形が良好の場合には、算出されたPID定数のセットは行いません。)
従って、目標値変更時の応答は目標値変更時に設定されているPID定数に依存します。
(このとき、目標値応答が良好でない場合は、立ち上げATによりPIDパラメータの修正が行われるので、次回の目標値変更時からは良好な目標値応答が得られます。)
●セルフチューニングによるPID定数の算出について
セルフチューニング機能は、目標値変更または電源投入が行われた時点から目標値に安定するまでの観測量の応答からPID定数を算出します。
算出されたPID定数は、目標値に対する応答が悪いときのみコントローラに設定されます。
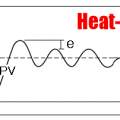
●目標値応答の評価について
「応答速度」「行き過ぎ量」「減衰量」を評価します。
●セルフチューニングによりPID定数が変更されるタイミング
応答評価の結果「応答不良」と評価されたタイミングで新しいPID定数をセットします。
②制御応答が振動したときのセルフチューニング
制御対象の特性変動や運転条件の変化などにより、制御応答が振動的になったときに、振動を収束させるようにPIDパラメータを自動修正するセルフチューニング機能です。
●振動時セルフチューニングによるPID定数の算出について
セルフチューニング機能は、観測量の応答波形(振動応答)よりPID定数を算出します。
●振動時セルフチューニングによりPID定数が変更されるタイミング
観測量が持続的に振動しており、振動の減衰率が良好でないと判断されたタイミングで新しいPID定数をセットします。
■セルフチューニング機能を使用するにあたって
●コントローラの電源投入時には、ヒータ電源など制御対象の電源を、あらかじめ投入しておいてください。
「電源投入・目標値変更時」のセルフチューニング機能は、目標値変更または電源投入が行われた時点から目標値に安定するまでの観測量の応答からPID定数を算出します。
このため、コントローラの電源投入時にヒータ電源など制御対象の電源が投入されていないと、[測定された応答]と[本来の応答]が異なったものになるため、セルフチューニングにより不適当なPID定数が算出・設定される場合があります。
●以下のような制御対象は、セルフチューニングによって不適当なPID定数がセットされる場合がありますので、セルフチューニング機能を使用しないでください。
①周期的に大きな外乱(制御不能外乱)が入るような制御対象
(例:射出成型器の金型温調、半導体製造装置のホットプレートの温調)
②相互干渉の非常に強い制御対象
ただし、押出機シリンダ部分の温度制御など、相互干渉がそれほど大きくない制御対象であれば問題ありません。
「振動時」のセルフチューニング機能は、PID定数のミスマッチ(P:小、I:小、D:大 など)が原因で振動した場合に、PID定数のゲインを適切に緩めて、振動が収まるように動作します。
したがって、上記①,②のような周期的な外乱の影響で見かけ上振動しているように見える応答に対しても同様に動作してしまうため、結果的にセルフチューニングによってPID定数がゆるく修正されてしまいます。
一般に、上記①,②などによる影響を抑制するためには、PID定数をきつめに修正する必要があることから、振動時のセルフチューニングではこれらの条件での最適定数は算出されません。
また、上記した条件でセルフチューニング機能を動作させた場合、PID定数が緩く設定されるため、目標値変更や外乱に対して応答が緩慢になります。
■「オートチューニング」と「セルフチューニング」の違いは?
*オートチューニング機能のことを「AT」、セルフチューニング機能のことを「ST」と表します。
●基本動作
(AT)オン/オフ制御の応答からPID定数を算出・設定する
(ST)特別な操作なしで、コントローラ自身が制御応答を観測し、PID定数を適切な値に変更する。
●算出結果
(AT)1回のチューニングで最適なPID値が求まる
(ST)1回のチューニングで最適なPID定数値に収束しない場合がある
●チューニングの実行
(AT)手動にてオートチューニングの実行を指令する必要がある。
(ST)コントローラにて自動実行する
(ST)目標値変更や、応答が振動的になるなど制御状態が変化しないと実行されない
●チューニング中の応答
(AT)オン/オフ制御を行うため制御が乱れる。
(ST)オン/オフ制御をしないので制御を乱さない。
●制御対象の特性変動時
(AT)再度オートチューニングを実行する必要がある
(ST)コントローラにて自動的にPID定数を設定を行う
セルフチューニング機能はオートチューニング機能とは異なり、通常の制御応答波形を観測して、PID定数を自動算出・自動設定する機能です。
■おわりに
①装置立ち上げ時の最初のチューニングには1回で良好な定数が求まる「オートチューニング」を用い、「オートチューニング」以降の特性変動については「セルフチューニング」で対応するという使い方ができると思います。
②オートチューニングを使用できない条件があります。
これらの場合はオートチューニングを使用せず、マニュアルによる調整を行ってください。